[ECCV 2024] Real-time Holistic Robot Pose Estimation with Unknown States Oliver Ban 6:09 2 weeks ago 32 Скачать Далее
Real-Time Human Action Recognition Using Pose Estimation on Multiple Persons Algorithm Planet 0:27 2 years ago 8 476 Скачать Далее
Human Pose Estimation with AI in ROS 2 | Robotics Developers Open Class 193 The Construct 56:09 12 hours ago 124 Скачать Далее
Human Dancer vs AI Dancer (real-time 3D pose estimation demo) techie_ray 0:16 1 year ago 2 925 Скачать Далее
AI Pose Estimation with Python and MediaPipe | Plus AI Gym Tracker Project Nicholas Renotte 1:04:17 3 years ago 211 011 Скачать Далее
Real-time Robot Hand Control Using RGB Video Pose Estimation USRGTube 0:23 1 year ago 242 Скачать Далее
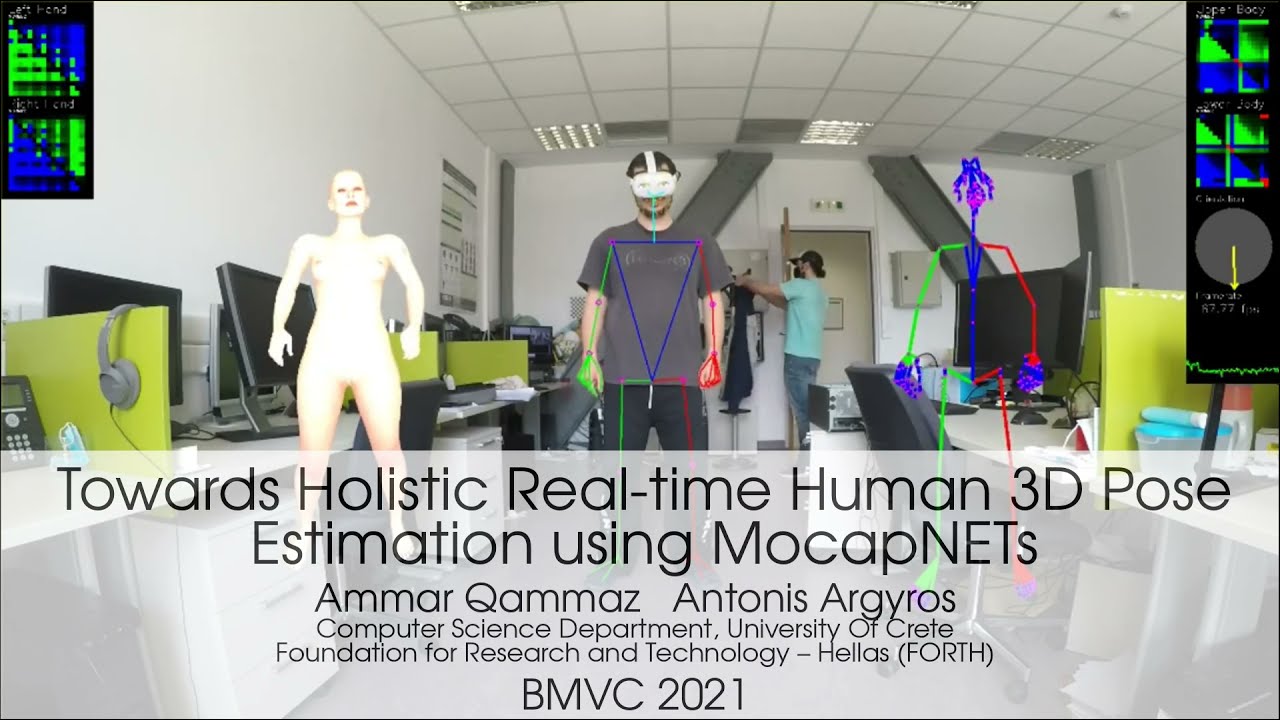
Towards Holistic Real-time Human 3D Pose Estimation using MocapNETs (BMVC 2021) Antonis Argyros 6:13 2 years ago 2 265 Скачать Далее
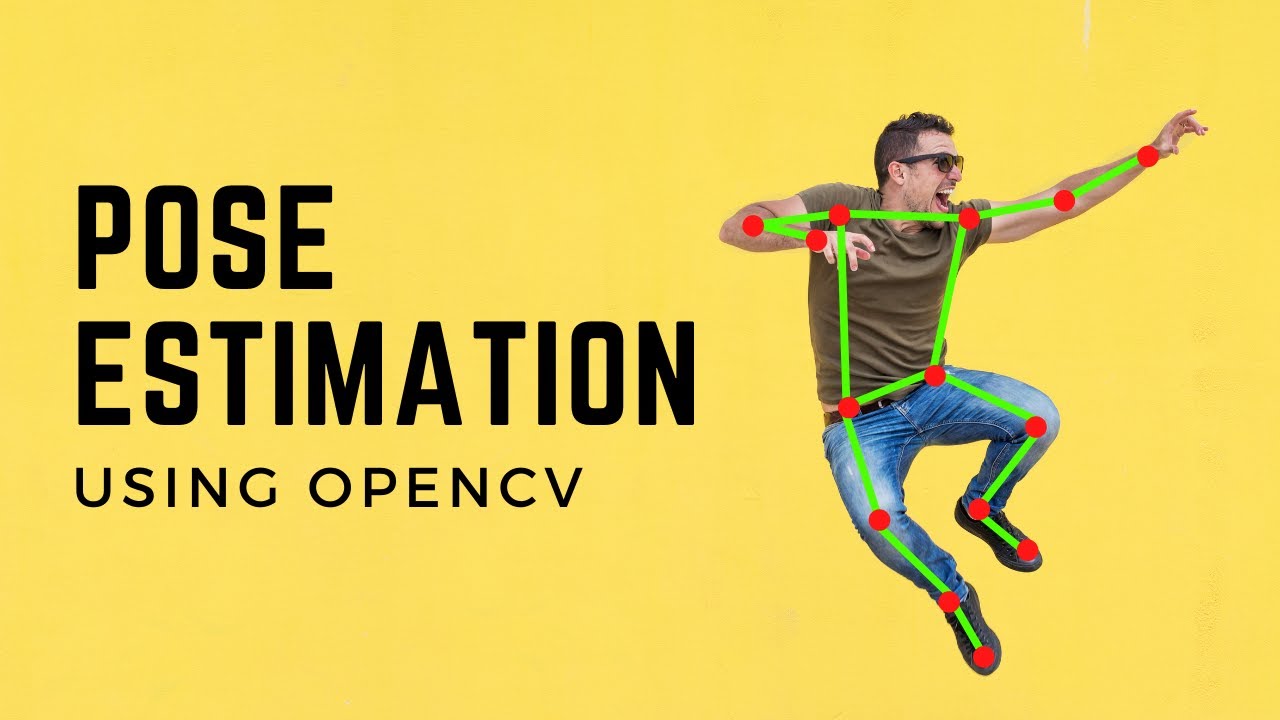
Latest Pose Estimation Realtime (24 FPS) using CPU | Computer Vision | OpenCV Python Murtaza's Workshop - Robotics and AI 41:03 3 years ago 174 149 Скачать Далее
AI-based Realtime motion-capture with pose-estimation at 60fps studio_ hopemeister 0:16 2 years ago 9 Скачать Далее
Research at NVIDIA: Deep Object Pose Estimation for Semantic Robotic Grasping of Household Objects NVIDIA 1:28 5 years ago 33 125 Скачать Далее
Real-time 3D robot pose estimation for Microsoft HoloLens Daniel Dimitrov 1:25 4 years ago 306 Скачать Далее
Testing Stable Diffusion inpainting on video footage #shorts karenxcheng 0:16 1 year ago 8 604 755 Скачать Далее
VIPose: Real-time Visual-Inertial 6D Object Pose Tracking ARPL NYU 0:58 2 years ago 1 359 Скачать Далее
Media Pipe Holistic face mark, hand tracking, human pose estimation using deep learning ROBOTICS FOR UNITED INDIA 8:33 1 year ago 84 Скачать Далее
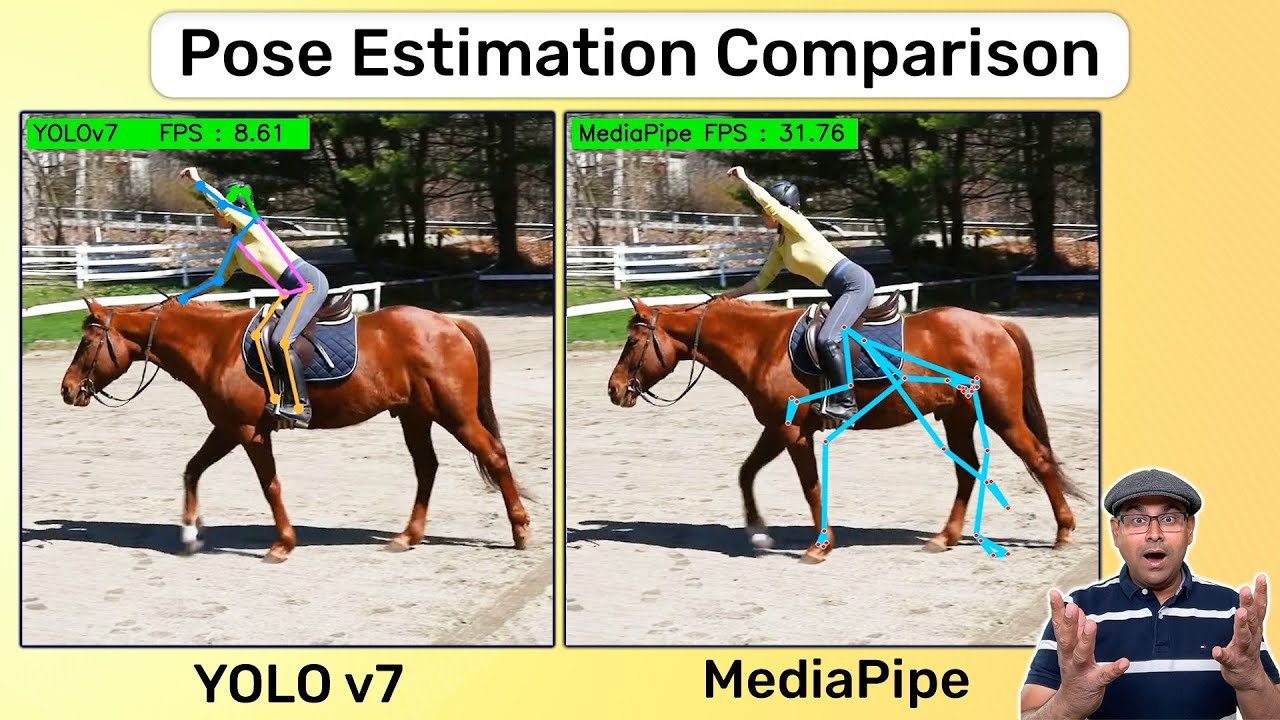
Official YOLOv7 Pose vs MediaPipe | Full comparison of real-time Pose Estimation | Which is Faster? LearnOpenCV 9:10 1 year ago 69 551 Скачать Далее
Real-time AI-based quality check and deep learning-based job pose estimation and gripping Center_of_Excellence __AMT_IIT_KHARAGPUR 1:56 3 years ago 337 Скачать Далее